2023全球自動駕駛峰會順利舉辦,奇點將至,共赴繁榮。
作者 | 邇言明成
編輯 | Juice
2023全球自動駕駛峰會(GADS 2023)正式落下帷幕。
車東西12月21日消息,日前,2023全球自動駕駛峰會(GADS 2023)在深圳順利閉幕,多位行業專家、自動駕駛企業代表、自動駕駛分析投資人士代表齊聚一堂,共同為自動駕駛行業的發展提出了各自的真知灼見。
本屆峰會由智一科技旗下智能汽車產業新媒體車東西聯合硬科技講解與服務平臺智猩猩主辦,以「奇點將至 共赴繁榮」為主題,共設置了主會場會議+分會場論壇+展覽+榜單四個環節。
在主會場上,15位嘉賓帶來了14場主題演講和致辭,并有3家創企CEO圍繞大模型賦能、市場機遇等論題進行了深度對話。此外,峰會現場還揭曉了2023年度中國自動駕駛產業鏈先鋒企業TOP50榜單,這是“AI生產力創新獎”系列評選中,面向自動駕駛產業的專項年度企業榜。
峰會吸引了來自全國各地的自動駕駛工程師、創業者、投資人積極踴躍參加,每個會場幾乎都座無虛席,全網觀看直播的人數近80萬人。

▲峰會現場
清華大學計算機系長聘教授、博士生導師、清華大學人工智能研究院視覺智能研究中心主任鄧志東教授對多模態大語言模型進行了報告,為本次自動駕駛峰會拉開了序幕。上海AI Lab浦駕OpenDriveLab團隊也分享了其對于端到端自動駕駛的認識和發展思路。
整場會議也圍繞大模型和自動駕駛進行了深入的討論,主機廠和供應商都從各個角度帶來了思考。
智己汽車從整車廠的角度分享了他們對于大模型車端量產化交付的實踐與思考。
德賽西威、智行者、環宇智行圍繞智能駕駛方案的量產和落地進行了分享,千掛科技則分享了商用車智能駕駛的落地實踐與技術新趨勢。凱芯科技也從高精度定位如何促進城市NOA落地和推廣角度進行了思考。
吉利朗歌科技、昇啟科技、愷望數據分別分享了高精地圖、仿真、智駕數據對于NOA的發展和落地帶來的幫助。
安謀科技圍繞芯片設計和汽車智能化的發展提出了自己的看法,黑芝麻智能則分享了他們對于艙駕一體、跨域融合的最新思考和實踐。
華興資本集團分享了自動駕駛下半場的產業發展趨勢及所帶來的投融資機會。
而除了主會場15位嘉賓帶來了分享,本次峰會還首次開設了兩場分會場。在自動駕駛分析師論壇上,多位來自全球知名分析機構和投資機構代表對自動駕駛進行了多維度的分析;自動駕駛BEV感知技術論壇則聚焦到感知技術領域,多位青年學者和自動駕駛企業首席科學家同臺對話,共同探討了感知技術最新的進展和行業發展方向。
整個演講過程中,多個自動駕駛產業大咖都拋出了非常有趣的觀點,數次贏得觀眾的掌聲,直播過程中也刷屏不斷,火熱的氣氛將自動駕駛峰會的盛況推到了高潮。
那么,2023年智能駕駛行業究竟發生了哪些變化?2024年又該如何發展?智能駕駛最終應該如何落地?車東西詳細梳理了主會場15位大咖分享的干貨,看行業大咖如何為智能駕駛落地把脈。
01.
大模型驅動端到端落地
自動駕駛行業奇點將至
智一科技聯合創始人、CEO龔倫常作為主辦方代表進行了開場致辭,從自動駕駛行業角度介紹了峰會的背景。

▲智?科技聯合創始人、CEO龔倫常
他表示,一方面,BEV+Transformer成為自動駕駛感知的主流范式,加上大模型又在仿真、數據標注、感知和預測等方面為自動駕駛賦能,汽車的智能化普及率快速攀升;另一方面,政策也在為產業提速,工信部等四部委聯合發布的智能網聯汽車準入和上路通行試點通知,將推動L3和L4在商業化與規模化以更快的速度邁進。
為此,第五屆全球自動駕駛峰會圍繞高階智能駕駛、大模型應用、自動駕駛大算力、BEV感知技術等方向設置議程,并首次設置了自動駕駛分析師論壇,期望為行業的交流和技術發展盡一份力。
他同時透露,智一科技旗下在產業有廣泛影響的IP峰會--全球自動駕駛峰會、全球AI芯片峰會以及生成式AI產業峰會,明年也將繼續在北京、深圳、上海等地舉辦。
清華大學計算機系長聘教授、博士生導師、清華大學人工智能研究院視覺智能研究中心主任鄧志東教授以《多模態大型語言模型助力自動駕駛產業落地》為主題的報告正式拉開了峰會的序幕。

▲清華大學計算機系長聘教授、博士生導師、清華大學人工智能研究院視覺智能研究中心主任鄧志東教授
鄧志東教授提出,多模態大語言模型是一種能夠進行視覺感知和交叉理解的通用語言模型。它可以通過少量樣本來實現視覺感知和交叉理解,不再需要大量標簽訓練。同時,通過多模態的方式可以實現對駕駛場景、自車、他車、道路交通元素以及它們之間關系的理解,從全局到局部,從局部到全局,并且可以將視頻中的每一幀圖像轉換為文本并進行解釋。
多模態交叉理解與知識推理可以實現從感知理解到決策規控的端到端化,其中多模態交叉理解指的是駕駛過程中圖像、視頻、點云、語音、文本之間基于人類語義的相互轉換與對齊。我們可以嘗試通過視覺語言模型來對各個環節進行連接,以此提升整個環境感知和決策規劃系統的一體化認知能力與水平,而知識推理則可加強此過程。此外,通過多模態大型語言模型可實現對各種下游任務的適配,以便獲得開放視覺詞匯多任務零樣本泛化能力,如零樣本檢測與零樣本分割等,同時結合駕駛領域專業知識喂養與特定場景的數字孿生,進一步增強多模態大模型的準確性與泛化能力,并減小其幻覺。這些感知與認知技術的實際應用可望加速提升自動駕駛系統的智能化水平。
多模態大型語言模型不僅可增強NOA等L2++自動輔助駕駛產品的技術及市場競爭力,更可推動L3+與L4自動駕駛產業未來的大規模商業化落地,特別是單車智能的發展。同時運用AI大模型預測技術賦能一對多遠程安全接管迭代,通過單車智能+智能路網的技術路徑,構建可盈利的商業模式閉環,實現整車L3+的大規模商業化落地和中國方案的產業化創新引領。
上海AI Lab浦駕OpenDriveLab團隊研究員陳立則聚焦于端到端自動駕駛領域,分享了他對該領域前景與挑戰的思考。

▲上海AI Lab 浦駕OpenDriveLab團隊研究員陳立
他先闡明端到端自動駕駛的定義,即通過輸入傳感器的數據,輸出規劃和控制的結果。
這種方案優點非常明顯,比如融合所有的模塊,是聯合優化的結果,能夠避免上游誤差,它對于部署輕量化可能性也存在。
但端到端方面也面臨很多問題,最突出的就是評測問題,現在最好方式是閉環評測,但閉環評估僅適用于模擬器/機載測試,消耗人力物力,同樣也缺乏可解釋性,這導致了端到端方案沒有模塊化方案那么好的性能。
那么端到端方案如何能夠最終落地?
陳立表示,他們團隊也曾設計過非常簡單的模仿學習,基于專家網絡訓練子網絡,比如TCP工作,但其在實際中具有不可解釋性的問題。隨著時間的發展,端到端的模型設計越來越復雜,性能也越來越好。他們在UniAD工作中基于Transformer架構做了融合和設計,進行感知、預測、規劃等多模塊信息融合,實現更好的規劃性能與優秀的可解釋性。
在最后,陳立也講述了另一種可能的落地方案,他認為可以讓Student Model只學感知部分,把感知的結果喂給訓練得很好的、因果推理能力也很強的Teacher Model,實現高效訓練。解耦感知和決策兩個部分之后,就具備了很好的因果推理能力,也具有模塊化的訓練優勢。
陳立表示,他們希望有一個非常通用的模型,基于大量已有數據與生成數據訓練,使其在自動駕駛或者具身智能任務里面發揮作用。
德賽西威智能駕駛傳感器事業部負責人江伙紅分享了企業在場景驅動下對智能駕駛商業化實踐與思考。

▲德賽西威智能駕駛傳感器事業部負責人江伙紅
江伙紅提到,智能駕駛行業正在迎來變革,包括技術革命推動汽車產業變革、購車主力人群對智能駕駛需求增加、政策法規支持以及智能駕駛面臨的挑戰、高階智能駕駛面臨信任度挑戰。
德賽西威從組織架構與商業模式、產品和產業落地三個方面進行思考。在組織架構和商業模式方面,德賽西威強調以用戶體驗為中心,聯合研發開放合作,與客戶共同成長,改變行業以往“一錘子買賣”的形式,為車企提供專業的軟硬件解決方案。
在產品角度上,德賽西威提供全棧自動駕駛解決方案,包括智能駕駛域控制器和傳感器解決方案,滿足不同層級車型的智能駕駛需求。智能駕駛未來的發展趨勢是大數據和大算力帶來更好更安全的體驗。
智行者科技聯合創始人、研發中心副總經理張放分享了智行者在全場景行泊越一體智能駕駛方案上的技術思路和量產成果。

▲智行者科技聯合創始人、研發中心副總經理張放
張放表示,一些主機廠對越野場景有非常大的訴求,因此把越野場景納入了行泊一體方案中。
他總結了新能源車主的主要購買因素。首先,新能源車消費者對價格相對不敏感,弱化尺寸、動力、配置等因素,看重算力、傳感器配置。其次,續航水平仍為消費者購買電動車的主要考量因素,但消費者對續航關注度與里程焦慮顯著下降。最后,智能化和自動駕駛的關注度與偏好日益顯著,成為吸引消費者購買車輛產品的主要因素。
目前,L2級輔助駕駛正在進入市場紅利期。特別是2023年可以稱作城市NOA元年,大多車企都公布了城市NOA開城計劃。
但是在實地落地過程中還是有很多問題需要解決,用戶體驗使用效果不如駕駛員,適用范圍受限,接管次數偏多,性價比不高。
為此,智行者打造了數據驅動的全場景行泊越一體的解決方案,包括AVOS自動駕駛軟件平臺、AVCU自動駕駛中央計算單元、AVDC數據閉環平臺。
此外,張放表示,大模型的潛在能力可以充分運用業務中。數據生成方面,可以低成本生成各類場景、各類目標和各種天氣情況的數據,包括Corner case等數據。 數據標注層面,大模型可以用于數據自動化標注或者根據已有標簽生成新的場景數據。傳感器適配上,大模型可以用于量產過程中sensor改變,給定一批目標sensor數據訓練,可將舊數據轉變成新sensor的數據。閉環仿真層面,利用world model的傳感器仿真和基于地圖等生成數據的能力可以實現從傳感器到控制輸出的閉環仿真。
千掛科技聯合創始人葉璨以卡車為切入點,介紹了商用車智能駕駛的落地實踐與技術新趨勢。

▲千掛科技聯合創始人葉璨
千掛科技的自動駕駛技術涉及感知預測和AD大模型兩個方面。感知方面,通過一個大模型感知所有相關的任務,使用多傳感器和多模態的融合來解決高速場景的挑戰。智駕大模型方面,他們使用點云和圖像進行特征融合,完成各種感知相關的子任務,如障礙物檢測和分割等。通過硬件和算法確保感知距離達到300~500米。
千掛科技還進行了多模態預訓練,旨在獲得自動駕駛場景下多模態的泛化特征。他們通過點云和圖像匹配的多模態數據訓練整個網絡,并對模型進行微調。他們還使用互聯網數據和自動駕駛數據進行聯合微調,以提高訓練效果和穩定性。這有助于識別自動駕駛場景中的長尾物體,如異形車和遺灑物。
千掛科技利用大模型進行數據閉環,通過挖掘高價值的長尾數據來優化模型,并利用端到端技術實現數據的規模和效率提升。他們的端到端算法AutraFlow是一個完全Learning化的架構,可以在車上運行并應用于產品和業務中。
華興資本集團華興證券董事總經理、硬科技團隊負責人阮孝莉作為主會場唯一投行視角,分享了自動駕駛下半場的產業發展趨勢及所帶來的投融資機會。

▲華興資本集團華興證券董事總經理、硬科技團隊負責人阮孝莉
首先從市場層面,借用技術采用生命周期理論,結合自動駕駛的滲透率來判斷,整體自動駕駛行業正處于跨越鴻溝的階段,也即將進入高速成長的下半場。新玩家進入難度加大,現有玩家加速破局。
接著從政策層面,她對2023年11月四部門聯合印發的《關于開展智能網聯汽車準入和上路通行試點工作的通知》進行了重點解讀。這是首次在國家層面以試點形式推動L3/L4級別自動駕駛商業化落地,在需求端能夠提振用戶信心,在供給端也能帶動新一輪技術研發和產品投放周期。
市場疊加政策雙重驅動下,城市NOA滲透率持續提升、中高端車型搭載高階自動駕駛將是兩大確定性趨勢。往前看,感知層、決策層、執行層等零部件層面與解決方案商層面均將受益于自動駕駛發展浪潮。
對此,阮孝莉分享了在投融資方面的機會判斷。在感知層,單車搭載傳感器數量持續增長,多傳感器融合是大勢所趨。其中,攝像頭領域更多是國產替代的機會。毫米波雷達建議關注技術革新過程中成長起來的,像加特蘭等技術水平比肩全球的企業。激光雷達的成本優勢是競爭關鍵,規模化量產和技術迭代會帶來價格的持續下探。
在決策層,隨著自動駕駛量產邁入深水區,國產芯片市場份額快速提升,建議關注國產芯片商的算力等性能指標與定制化、個性化的算法開發能力。在執行層,自動駕駛推動線控底盤發展,核心模塊自主供應商迎來發展機會,像蜂巢轉向是國內稀缺的中高端轉向產品供應商。在通信層,更高效的車載以太網加速滲透,建議關注以太網連接相關硬件的機會,例如國內首家量產千兆級車規PHY芯片的景略。
在解決方案商層面,規模量產能力與技術迭代能力是解決方案商的競爭關鍵。對于傳統主機廠、傳統Tier1、科技巨頭等來說,收并購可以快速補強智能化短板與增強系統方案能力,并購整合潮有望持續加劇。
02.
2023年度中國自動駕駛產業鏈
先鋒企業TOP50榜單正式公布
在幾位嘉賓進行分享之后,智?科技聯合創始?、總編輯張國仁正式公布了2023年度中國自動駕駛產業鏈先鋒企業Top 50榜單。
他表示今年是自動駕駛行業近十幾年來最重要的一年,政策方面兩條重磅政策為L3、L4自動駕駛商業化指明了方向,高階智能駕駛技術有了進一步的政策支持。大模型的技術爆發也給自動駕駛發展提供了新的思路。市場對自動駕駛的接受度也逐漸增加,自動駕駛產業鏈也越來越完整和強大。

▲智?科技聯合創始?、總編輯張國仁
華為、小鵬等企業開始利用大模型技術布局高端智能駕駛,市場層面,經過過去幾年的發展,市場對自動駕駛的接受程度也逐步提升,L2+以下的自動駕駛普及率已經達到50%,這是行業發展非常重要的臨界點。
如果站在更長時間的維度來看,今年將是自動駕駛發展中非常重要的一年,在這一年我們看到國內自動駕駛產業鏈越來越完整和強大,從傳感器到芯片、從配套的數據到云服務,再到完整的落地方案,一批產業鏈企業得到蓬勃發展,在技術創新的征程上越來越遠。
自動駕駛行業的發展離不開產業鏈每一個公司的貢獻,自動駕駛又是打造新的出行方式基石,也是一個充滿生機和大有作為的產業,更是中國科技力量引領世界的機會,祝愿更多智能駕駛產業鏈公司在自主創新的道路上結出豐碩的果實!
在這樣的背景下,2023全球自動駕駛峰會設立了2023年度中國自動駕駛產業鏈先鋒企業榜單,希望對引領技術創新研究、走在落地賦能前列的中國自動駕駛產業鏈公司及創業新秀予以展示。
而在峰會上,張國仁也正式公布了最終名單,分別是阿維塔、安謀科技、AutoX、百度Apollo、北醒、滴滴自動駕駛、大疆車載、地平線、德賽西威、禾多科技、后摩智能、毫末智行、禾賽科技、火山引擎、華為、黑芝麻智能、覺非科技、曠視科技、愷望數據、凱芯科技、理想汽車、MAXIEYE、Momenta、美行科技、魔視智能、寧暢、Nullmax、千掛科技、輕舟智航、如祺出行、昇啟科技、速騰聚創、商湯絕影、四維圖新、探維科技、騰訊云計算、蔚來汽車、文遠知行、芯馳科技、希迪智駕、小馬智行、小鵬汽車、易航智能、元戎啟行、嬴徹科技、馭勢科技、智加科技、智己汽車、知行科技、智行者。(排名不分先后,按公司簡寫首字母排序)
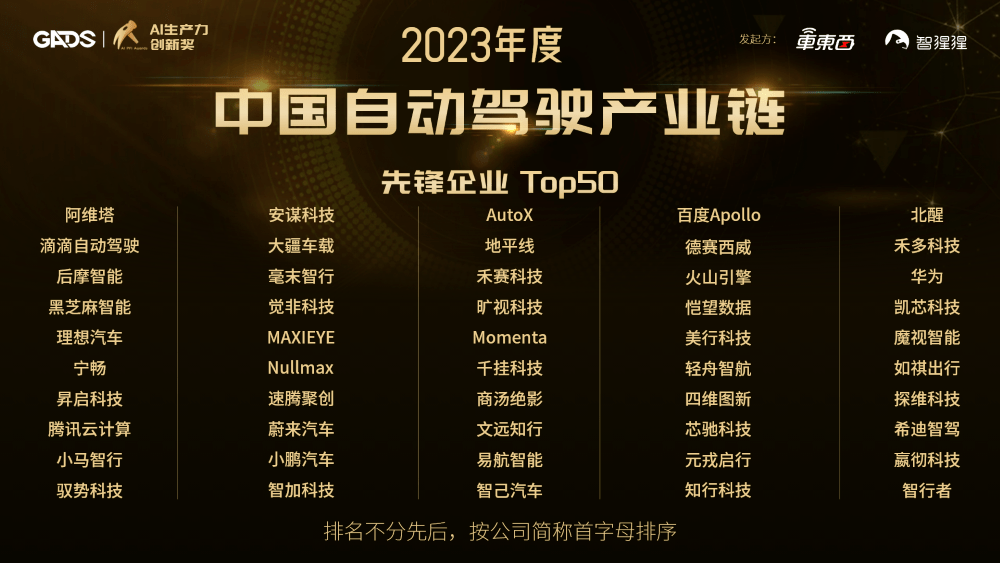
▲2023年度中國自動駕駛產業鏈先鋒企業榜單
03.
智駕“iPhone時刻”將至
出海正當時
在上午場的最后,多位行業人士關于“大模型如何重構自動駕駛”這一話題進行了一次深入討論。

▲?端對話:大模型如何重構自動駕駛
對話由五源資本合伙?劉凱主持。極佳科技創始?、CEO?冠,昇啟科技創始?、CEO孫琪,愷望數據創始?、CEO于旭參與了對話。
針對大模型對自動駕駛行業的啟發和借鑒的問題,黃冠認為,相信大模型會深刻影響自動駕駛,未來將顛覆整個自動駕駛行業。傳統的感知、預測、規劃的適配過程很麻煩,視覺感知大模型發展可能會出現通用智駕大模型。
于旭表示,大語言模型可以為自動駕駛帶來端到端的曙光,未來還能讓大語言模型賦能數據生產線,促進BEV等量產落地。孫琪則認為,大語言模型將推動智駕智艙融合,提升人機交互效果。大模型還將賦能智駕數據挖掘處理工作,未來可能會賦能云端數據處理。
而針對大模型是否會讓“iPhone時刻”提前到來的問題,三位嘉賓也發表了自己的意見。
整體上來看,三位嘉賓對于這一趨勢非常認可,只是對于時間的考慮略有不同。
黃冠認為最快1年,最慢2~3年,自動駕駛行業將迎來“iPhone時刻”,目前數據、算力、算法、人才、需求等條件都具備了。于旭也認同這一觀點,她還提到,自動駕駛開始往量產的方向走,現在大語言模型也是某種技術的變革,這種變革在強需求的情況下會加速智駕迭代。
而孫琪則覺得智駕的“iPhone時刻”會更快一些,特斯拉FSD V12就有類似效果。擁有算力、算法和數據的企業將具備發起“iPhone時刻”的機會。
在目前的自動駕駛行業中,既有一些布局已久的大公司,也存在一些初創新秀,兩方面勢力共同促進行業發展,又彼此形成了競爭。
那么在這樣的環境下,應該如何保持競爭力呢?
黃冠認為創業要么把一個點做到極致,和整個產業鏈合作,要么就結合技術變革來做。目前中國還是有很好的創業機會,因為中國整個需求和應用非常成熟。下一次駕駛的變革不是駕駛公司帶來的,是大模型公司帶來的,可能是OpenAI或者特斯拉。
于旭認為自動駕駛行業一直有創業機會,早期提供智駕方案,往后可能更聚焦在工具層面上的支持,側重點不同但是機會一直有。大公司規模化的成本高一點,白熱化的競爭更激烈,小公司機會規模相對少一點,但是它的卡位會成為關鍵。
孫琪則認為各企業是在產業鏈上的分工,是合作的關系。大公司可以做好集成,小公司可以做好環節。
當下的智能駕駛領域,出海也是行業討論的一個大的話題點,針對這一問題,黃冠、于旭、孫琪都認為中國的產業投入和積累對外有一定的競爭優勢,中國企業出海擁有很大的機會,但也需要做好出海的本地化適配。
04.
輕高精地圖和視覺智駕方案崛起
端到端成趨勢
下午的主會場由高階智能駕駛專場、大模型專場和自動駕駛算力專場三個專場組成,8位嘉賓分享了各領域的最新發展成果和趨勢。
高階智能駕駛專場上,吉利朗歌科技CEO助理兼智駕中心負責人李戰斌,凱芯科技芯片產品負責?張迪,昇啟科技創始人、CEO孫琪對高階智駕落地前景和趨勢展開了分享。
吉利朗歌科技CEO助理兼智駕中心負責人李戰斌分享了《智駕高精地圖的困局與創新》。

▲吉利朗歌科技CEO助理兼智駕中心負責人李戰斌
李戰斌提出,自動駕駛行業苦“高精地圖”久矣,高精地圖面臨制作和審圖周期長、更新成本高、覆蓋度有限等痛點。
對此,朗歌科技推出了周天數據智能體系,打造面向智能駕駛的新一代智駕地圖。該地圖具備更新快、地圖元素最高周天級更新,質量高,可量產等優勢。
李戰斌表示,朗歌科技的目標是3年內讓單公里地圖價格在100塊錢以內。
朗歌把智駕地圖分成4個圖層(智駕ODD圖層,智駕地圖經驗層,智駕地圖更新層,智駕地圖基礎層),遵循ODD運營圖層配置開放、核心要素分鐘級在線生產與端側更新、智駕經驗圖層與智駕伙伴合作共建、道路環境信息動態發布、城高一體的智駕地圖規格、駐場貼身服務,快速推進業務落地的建設思路。
而在量產上車方面,朗歌智駕地圖的一體化引擎,能夠同時支持HD&HDLite數據規格,接口層無需重復適配,還能同時支持城區和高速數據播發,支持高速和城區一體化NOA,三明治引擎架構在3周時間,與智駕公司實現城區與高速的一體化NOA實車路測。
在更新速度上,朗歌智駕地圖的更新方式從專采向眾源過渡,更新頻率逐漸提升。
李戰斌還介紹了朗歌科技的真值數據服務的價值及優勢,其服務基于高精地圖數據的自動化標注,快速、批量生產BEV真值數據,助力主機廠縮短智駕開發與落地周期。
另外,朗歌智駕真值服務還提供了全自動化真值數據生產工具鏈,助力客戶快速冷啟動及算法模型持續迭代。
此外,李戰斌還表示,朗歌智駕地圖不僅僅用于真值生成,還用于構建仿真系統的道各種路環境生成,來提升智駕的落地速度。
在峰會上,李戰斌還介紹了朗歌科技周天數據智能體系之智算大腦:具身多模態地圖大語言模型。李戰斌強調該模型的重點是具身能力,將海量的吉利體系、自研采集、三方數據等眾源環境數據,經周天智算大腦具身大語言模型進行數據與地圖間的環境交互式生成,這樣智算大腦高自動化的生成智駕汽車視角需要的智駕地圖,迭代更新人類視定義制作的高精/高輔地圖,結合機器的博弈和強化學習等優化智能及仿真系統出品校驗等,幫車企更快落地智駕系統。
凱芯科技芯片產品負責人張迪在會上分享了車規級高精度GNSS RF-SoC芯片KT5030A,介紹了其在原始觀測量、開放的高性能處理器平臺、功能安全、安全策略、抗干擾、防欺騙等方面的優勢。

▲凱芯科技芯片產品負責人張迪
張迪提出,高精度定位是自動駕駛感知的基石,自動駕駛面臨惡劣氣候(傳感器使用受限)、復雜路況(環境特征多變,影響傳感器工作)、城區駕駛(道路狹窄,精度要求高)等挑戰。而高精度定位芯片能夠提供厘米級絕對位置信息,全天候定位、降低系統算力開銷、提供冗余能力。
KT5030A已通過AEC-Q100 Grade2 車規認證,可在105℃苛刻環境下穩定工作,且具有專業級GNSS接收測量引擎,具備國際領先的頻點信號支持能力,能夠同時對天上所有可見衛星的全部頻點信號進行接收處理,并支持全部的星基增強信號。KT5030A能夠提供行業領先的原始觀測量,除能夠支持L1和L5頻段外,還能支持到L2和L6頻段,收星數總量遠高于競品。
張迪提到,KT5030A在國內高精度行業內首先開放高性能應用處理器,用戶獨享該應用處理器,進行算法的二次開發,并提供完善易用的工具鏈,包括SDK開發工具和硬件開發平臺,幫助客戶快速完成市場導入。
KT5030A還設置了多維度的安全策略,提供可信的應用和開發環境,通過設置簽名檢查可實現安全啟動,并通過加解密策略實現用戶軟件的IP保護,降低密鑰泄露風險,保護第三方的價值。
在功能安全方面,KT5030A提供冗余的原始觀測量輸出方案,支持觀測量質量校驗矩陣,支持PVT Protection Level置信度指示,并提供心跳指示接口,通過功能安全MCU,可以對GNSS設備狀態進行監測。
KT5030A還具有先進的防欺騙抗干擾性能,能夠抵御高強度的干擾信號并有效抵御欺騙,在城市峽谷、林蔭路、高架橋等場景中展現出優異的定位性能。
張迪表示,KT5030A是業界最小尺寸高精度全頻點GNSS SoC芯片,在集成度、性能、功耗,尤其是開放度等方面處于領先地位,凱芯科技將提供高性能、高性價比并且靈活的高精度定位技術平臺,從底層賦能客戶,與行業伙伴實現共贏。
昇啟科技創始人、CEO孫琪進行了在數據閉環與端到端自動駕駛方面的分享。

▲昇啟科技創始人、CEO孫琪
孫琪表示,現階段“實車測試+專家規則”的開發模式無法實現高階自動駕駛。要想在有限時間和成本內積累高階自動駕駛所需的海量測試里程,仿真是唯一的途徑,并通過大模型技術為測試開發過程賦能。
傳統自動駕駛測試只能預設路線或者簡單的響應式行為模型,無法模擬強交互、強博弈場景,只能通過大規模路測驗證算法,成本高、迭代速度慢。
昇啟科技則提出了針對性的解決方案,通過多智能體博弈、對抗學習,驅動智能體自我進化,并推出了AI賦能的自動駕駛開發測試平臺,實現這一功能。該平臺由兩個數據飛輪組成,一個飛輪通過自動駕駛仿真平臺實現多智能體交互,另一個飛輪驅動AI引擎實現端到端的訓練,從而形成自動駕駛研發的“端到端+數據閉環”。
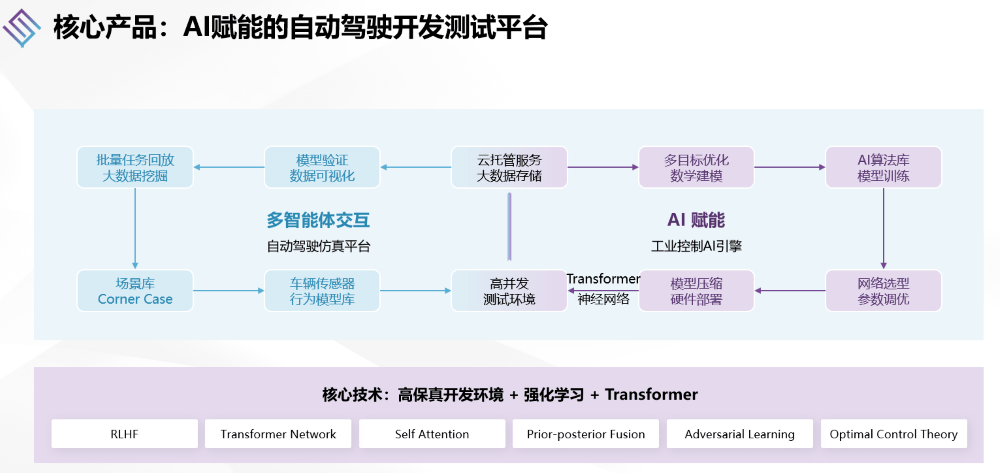
▲AI賦能的自動駕駛開發測試平臺
端到端+數據閉環相較于專家規則+回灌測試呈現明顯升級,首先在研發模式上不再基于人工設計規則系統,而是通過設計任務目標,自主訓練駕駛策略。場景覆蓋度上,基于無限場景測試,通過AI模型隨機交互,模擬真實路段行為,場景覆蓋度更高。測試效率上,可以實現數萬輛車多任務并發,效率更高。迭代模式上,以秒為單位迭代模型,實時更新參數,迭代速度更快。
這樣一來,能夠將幾輛車、單任務、有限場景跨越式地提升到數萬輛、多任務、無線場景的仿真量級,擺脫“手工作坊式”的專家規則系統,實現全自動端到端模型的自主升級路徑。
05.
大模型深度賦能數據訓練
量產上車在路上
大模型專場上,智己汽車軟件高級經理殷瑋,愷望數據創始人、CEO于旭對自動駕駛相關大模型進行了拆解分析。
智己汽車軟件高級經理殷瑋分享了大模型車端量產化交付的實踐與思考。

▲智己汽車軟件高級經理殷瑋
殷瑋指出,2015年之前是傳統汽車業的領域質量為先,對敏捷要求不高。2015年互聯網造車進入后,對質量和敏捷都有較高要求,預計2025年迎來第三個階段,即智能汽車與大模型融合的階段。智駕發展從可控性走向可擴展性,而大語言模型則相反,兩者將統一并探索AGI的雛形。智駕與大語言模型的發展方向不同,智駕更注重可控性和泛用性。
殷瑋認為,智能駕駛領域采用了時序數據、地圖、矢量SIL平臺和4D標注等技術來提高模型的認知等級。此外,還采用了語言大模型、多模態大模型、多模態的異常工況和低概率工況的數據生成以及渲染級的仿真系統,利用知識驅動的提示詞工程來生成樣本,處理低概率和極限工況。通過這些技術的應用,希望能夠實現更高層面的認知能力。
在域控架構下,大模型和集中架構都有各自的優勢。如果只討論規則算法或分體的AI模型,域控架構帶來的收益未必弱于集中架構,甚至可能更有優勢。目前來說,真正意義上的大模型在集中化架構上進行單體設備的集成還不現實,但基于“域控+SOA”級別的中模型已經具備了量產價值,可能在車端比大模型的價值更大。
大模型在車端應用和GPTS一樣,是一個認知階躍的過程,需要多個要素配合智駕模型的提升,包括特征維度的提高以及多模態異常工況數據生成和渲染級仿真系統的應用。在智艙和智駕之間的集中化架構調整中,模型也在逐步向域控化整合和服務化差異化發展。目前,這些大模型的應用仍處于初級階段,但未來有望實現差異化的優勢。
愷望數據創始人、CEO于旭帶來了她在如何又快又準的訓練“自動副駕駛”方面的思考。

▲愷望數據創始人、CEO于旭
于旭表示,要為自動駕駛提供超級快的服務。她從以下幾方面介紹了愷望的具體措施。
第一是服務速度要快,愷望正在打造自動化AI數據產線,提供一站式AI數據。第二是團隊要快,打造技術+運營的全鏈路人才。第三是爬坡期要快,實現快速突破。于旭介紹了行業頭部主機廠的需求訂單,“200頁文檔,愷望僅用了兩周的時間完成了數據的審核,而借助大模型,兩天的時間也達到了同樣效果”。
第四是工具落地要快,愷望使用了易于集成第三方工具的平臺,方便各類場景集成。第五是訂單量和客戶量的增長要快,愷望成立僅一年,月訂單額就突破了1000萬+,由于服務速度和工具落地的“快”,供應價格有能力相較業內降低20%。
于旭還介紹了不同的駕駛位有不同的訓練方法,對于自動副駕駛來說,訓練前要找到最適合訓練副駕駛的人并配備高效率的工具鏈,訓練中要快速對副駕駛的輸出進行評測,訓練后要幫助副駕駛適配應用場景。于旭也表示,大模型時代開發門檻降低,但對場景的理解和數據梳理的需求變高。
最后,如何又快又準的訓練“自動副駕駛?”于旭用了一句話歸納,訓練前,找人才,訓練中,提銷量,訓練后,做場景。
06.
緩解算力焦慮
推動智能汽車快速落地
自動駕駛算力專場上,安謀科技汽車業務線業務發展與方案總監曾霖、黑芝麻智能芯片和架構副總裁何鐵軍、環宇智行CEO曹晶分享了自動駕駛算力平臺所面臨的問題和解法。
安謀科技汽車業務線業務發展與方案總監曾霖在會上發表了題為《高性能融合計算IP平臺加速智能車芯發展》的主題演講,分享了安謀科技在汽車電子領域的技術積累與市場優勢,以及通過打造高性能融合計算IP平臺,推動智能汽車“芯”發展。

▲安謀科技汽車業務線業務發展與方案總監曾霖
曾霖表示,汽車市場是持續增長的單一大市場,年銷量穩步上漲,行業數據預測2023年中國汽車總銷量將達3000萬輛左右,消費者對新能源汽車的興趣也在不斷升溫,從需求端為智能汽車芯片發展提供了有力支撐。此外,隨著汽車行業的電子電氣架構變革日趨深化,多域到中央計算成為趨勢,對芯片廠商提出了更高的要求。
安謀科技依托于自研的高性能計算平臺,將CPU、NPU、SPU、VPU等計算單元進行智能化融合,并結合領先的Arm IP 技術,為本土汽車電子市場提供多元化、定制化的產品及解決方案,滿足智能駕駛和智能座艙的不同需求,在為車載芯片開發帶來靈活性的同時,也能從功能、質量、開發時間和成本等方面提供明顯的優勢,全方位賦能國產智能駕駛技術的高質量發展。
曾霖提到,過去一臺平臺車型從立項到上市可能需要五年以上時間,而現在,國內已有主流車廠只需兩年(即24個月)就可以推出一款新的品牌車型,甚至還有些Tier1主機廠商開始積極調整內部組織結構,以爭取將新車研發周期縮短至12個月。在此背景下,安謀科技憑借精準的前瞻性眼光和豐沛的工程技術資源,通過并行開發和虛擬化設計等方式,幫助汽車芯片廠商有效節省研發時間和成本,使其可將寶貴的研發資源投入到能夠打造差異化的地方。
在生態方面,安謀科技也在積極開展生態伙伴計劃,攜手上下游產業伙伴共同促進中國智能計算生態的創新和繁榮。
黑芝麻智能芯片和架構副總裁何鐵軍也分享了新一代智能汽車跨域計算芯片的應用能力。

▲黑芝麻智能芯片和架構副總裁何鐵軍
何鐵軍表示,智能汽車“智能化”面臨的三大挑戰和矛盾,分別是性價比、個性化、易用性。
為了實現軟件定義汽車,針對不同客戶群和產品形態定義不同的產品需求,同一硬件平臺實現不同的差異化配置,為用戶提供差異化的功能體驗,芯片作為硬件平臺的核心,對計算芯片的性能、架構靈活性、性價比都提出了更高的要求。
對此,黑芝麻智能研發了兩條產品線,一個是面向高階自動駕駛的華山系列,另一個是面向跨域計算的武當系列。其中,作為一款“All in one”的芯片,C1200主打多域融合和跨域計算,單芯片覆蓋智能車核心場景,涵蓋智能駕駛、智能座艙、智能網關、域控MCU,支持艙駕一體,真正做到“一芯多域”。其獨立ASIL-D MCU滿足高性能實時算力需求,此外基于Gen1.5 DynamAI NN神經網絡處理器,計算效能較上一代提升超過50%。
C1200能為中國本土Tier1和主機廠提供兼具高性價比和高價值的NOA智能駕駛方案,加速艙駕一體商業化落地。目前,C1200已經完成流片后的完整測試,功能性能驗證成功,已經開始給部分客戶送樣。
何鐵軍表示,黑芝麻智能通過不斷技術創新,為行業伙伴提供多樣化方案,解決性價比、計算能力的焦慮。未來黑芝麻智能還將繼續和行業伙伴一起,持續賦能汽車行業。
在峰會最后,環宇智行CEO曹晶介紹了智駕技術中的智駕域控和算力平臺從哪些需求出發來解決規模化量產問題。

▲環宇智行聯合創始人、CEO曹晶
曹晶認為,當前智駕技術正朝著軟件主導和硬件集約的方向發展,產業鏈重心從一體化智駕方案供應商向視覺和算力芯片硬件供應商以及數據和軟件供應商轉變。
環宇智行已經培養了跨平臺、跨SoC的能力,并積累了多款SoC的域控制器方案。其平臺提供感知、融合、預測、規劃、控制算法等功能,并提供多源傳感器數據的一毫秒時空配準,還能實現不同傳感器數據的融合。
智駕技術還需要異構多核架構和算力平臺+模型部署來支持各種功能需求,同時滿足數據周轉、法規要求數據安全、corner case挖掘等方面的要求。目前,環宇智行已經提供了系統級數據采集解決方案,并積累了APA和NOA等場景的實車測試經驗。
在端到端視覺處理方面,環宇智行認為可以借鑒手機ISP提升圖像質量方面成功的研發方式和產品經驗,提出可以在SoC中加入AI-ISP小芯片來提升圖像性能,降低智駕算法對算力的需求。此外,針對corner case場景,環宇智行提出利用AI-ISP前處理芯片來處理暗光等場景,降低SoC上感知模型的任務復雜性,擴展智駕算法在各種corner case場景的覆蓋。
07.
結語:政策大模型賦能行業
自動駕駛奇點將至
今年,自動駕駛行業在政策和技術賦能下有了新的改變。政策方面,兩條重磅政策為L3、L4自動駕駛商業化指明了方向,高階智能駕駛技術不再是“空中樓閣”,高階智駕落地有了進一步的政策支持。大模型的技術爆發也給自動駕駛發展提供了新的思路,或將徹底顛覆智駕發展方向。同時,市場對自動駕駛的接受度也逐漸增加,自動駕駛產業鏈也越來越完整和強大。
在這樣的行業背景下,自動駕駛全產業鏈生機勃勃,蘊含了巨大的動力和能量。在峰會現場各領域各方向的大咖分享下,我們可以看到,自動駕駛行業將在不久的未來向更高層級發展:城市NOA功能正在落地,L3級別自動駕駛也在路上,全自動駕駛也并非是遙不可及的理想。
可以說,自動駕駛正在由落地向高層級高水平發展,自動駕駛行業的奇點將至,你我將共同見證。